快速原型(RCP)
RCP(Rapid Control Prototype),即快速原型系統,用于幫助ECU軟件工程師(shī)在實際的車(chē)輛(liàng)或台架上(shàng)驗證ECU的控制(zhì)策略設計(jì), 以确保設計(jì)的有(yǒu)效性和(hé)可(kě)靠性。
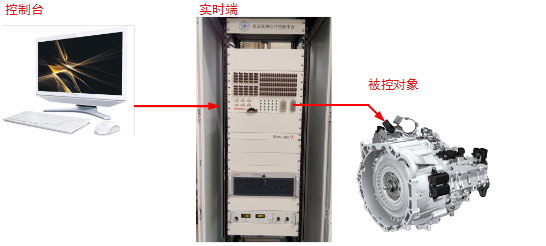
系統主要由三部分組成,控制(zhì)台、實時(shí)端和(hé)被控對象。
控制(zhì)台用于實現以下功能:
- 控制(zhì)模型搭建和(hé)修改,基于Matlab/Simulink;
- 控制(zhì)模型的編譯,模型參數(shù)與實時(shí)端硬件端口的映射,模型的下載;
- 控制(zhì)模型在實時(shí)端的運行(xíng)控制(zhì)、狀态監測,以及過程數(shù)據記錄;
- 與實時(shí)端使用千兆LAN連接,高(gāo)速、穩定。
實時(shí)端具有(yǒu)如下的特點和(hé)功能:
- 基于通(tōng)用設備總線的硬件平台,成本低(dī)、擴展方便;
- 基于Linux的實時(shí)軟件平台,支持mS級的運算(suàn)控制(zhì);
- 豐富的硬件接口,滿足各種傳感器(qì)和(hé)執行(xíng)器(qì)的接口需求;
- 支持FIU、BOB、OBD等接口和(hé)功能的擴展。
被控對象,即與ECU真實連接的汽車(chē)系統,如發動機、變速箱等。


